Bring Me a Beer: A Turing Test for Home Robots
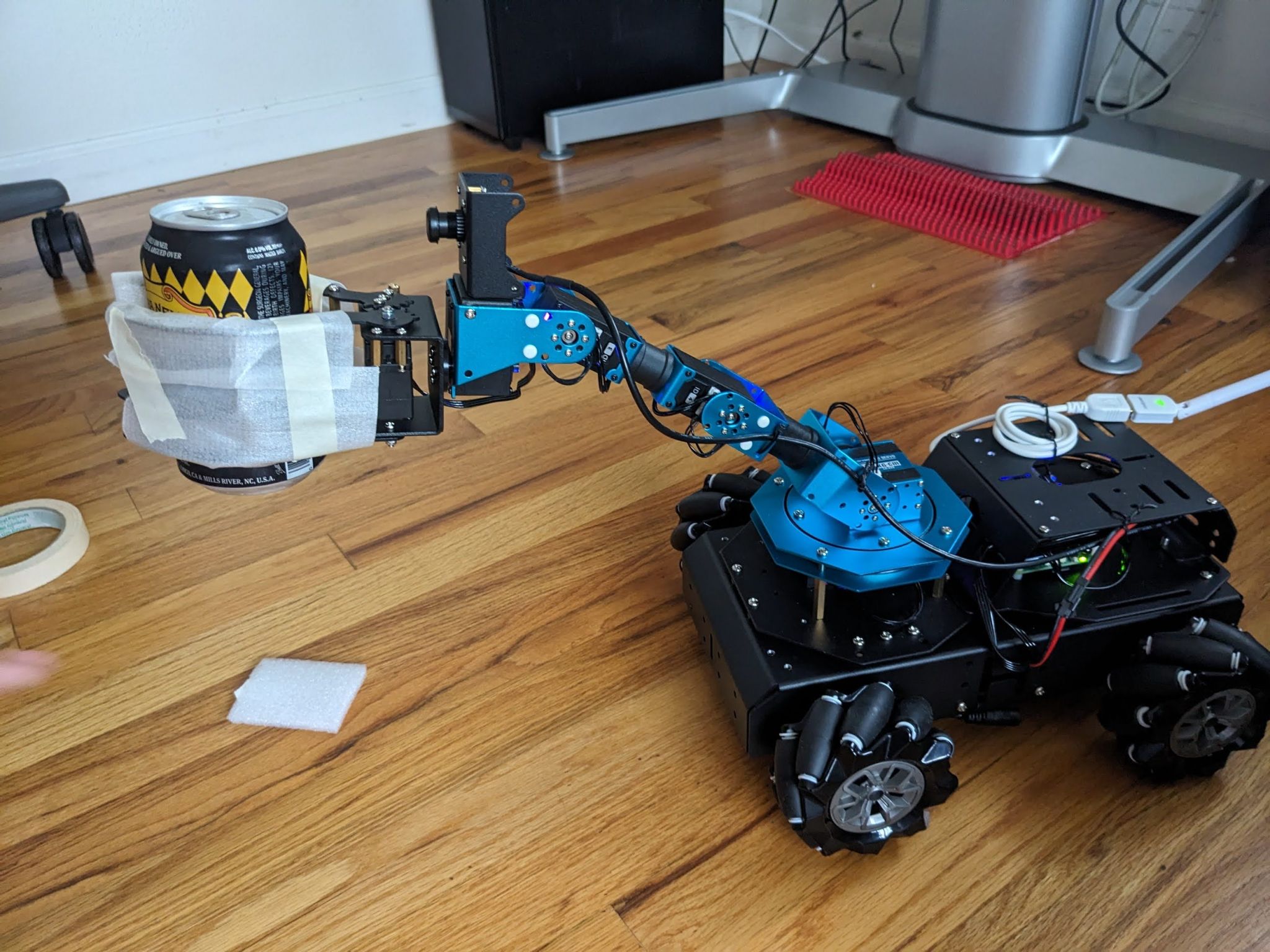
Jealous of other robot arms moving around, I got my robot (Hiwonder Armpi Pro) and have started to hack it. It’s not open source, but the parts are metal and the company provides enough source code to hack.
The Bring Me a Beer Test
A “Turing test” for home robots is the “bring me a beer” task. It’s still hard.
This seemingly simple task requires:
- Navigation to the right location
- Object recognition and grasping
- Robust manipulation without dropping
- Safe navigation back while carrying an object
- Handoff to a human
Each of these is a research problem in itself, and integrating them reliably is even harder. But that’s what makes it a good benchmark - it’s grounded in a real task people actually want.
Why the Armpi Pro?
While not fully open source, the Hiwonder Armpi Pro provides:
- Metal construction (more robust than plastic alternatives)
- Enough source code to understand and modify behavior
- Reasonable price point for experimentation
- Active community
It’s a good platform for learning and experimentation without the cost of research-grade hardware.